
در این پست به بررسی یکی از ابزارهای مهم کاوشگر InSight که وظیفه جابه جایی ابزارهای علمی را دارد می پردازیم.
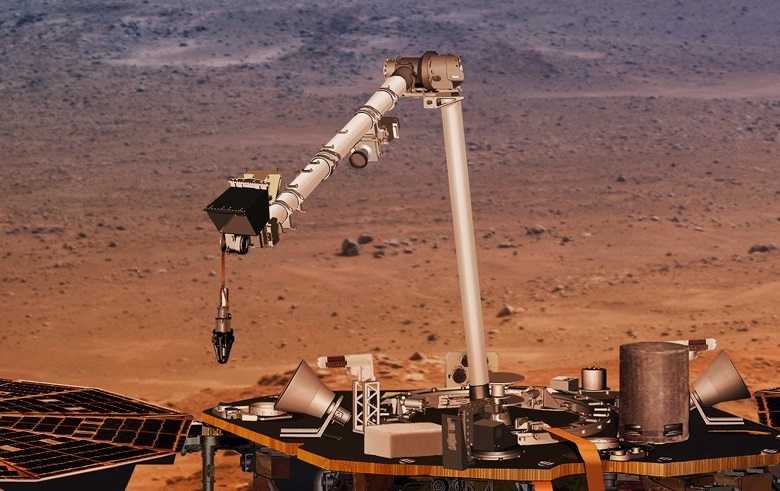
سطح نشین از بازوی رباتیکی با نام اختصاری IDA (Instrument Deploment Arm) برای جابهجایی و گذاشتن ابزارها بر روی زمین استفاده می کند. ابزارهای آزمایش باید در تماس مستقیم با مریخ قرار گیرند تا بهترین کارایی را داشته باشند. پس از فرود InSight پنل های خورشیدی باز می شوند و دوربینهای روی بازو شروع به بررسی سایت محل فرود می کنند.
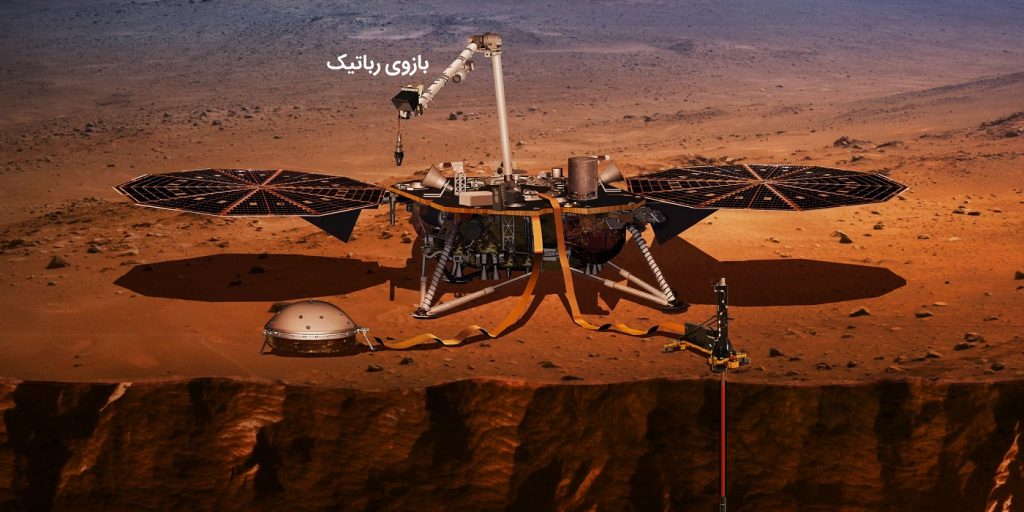
بازو دارای ۲.۴ متر طول، ۴ موتور و یک مجری نهایی چنگک مانند در انتهای خود است، همچنین دوربینها قبل از مجری نهایی و بر روی مچ بازو قرار گرفته اند. بازو باید ابزار کاوش زمین که می تواند تا عمق ۵ متری درون مریخ فرو رود را بر روی سطح مریخ قرار دهد، این عمیق ترین مکانی است که یک ابزار علمی در مریخ ان را مورد آزمایش قرار می دهد.همچنین ابزار لرزه نگاری را بر روی مریخ قرار می دهد تا به بهترین نحو مریخلرزه ها را اندازه گیری و ثبت کند.
بازوی رباتیک دارای یک مجری با ۵ انگشت مکانیکی است که قادر استبه کمک انها ابزارها را جا به جا کند (البته از تکنولوژی مورد استفاده در بازو صحبتی نشده است! ) این بازو باید ابزارهای مهمی نظیر سنجش متر لرزه ای ساختار داخلی و جریان گرما و کاوشگر آزمایش خصوصیات فیزیکی و سنسورهای Wind و Thermal shiold را جابهجا کند.
مشخصات فنی بازوی رباتیک InSight :
| ماموریت اصلی | قرار دادن ابزار SEIS، ابزار HP3، سنجش جریان گرما |
| طول | ۲.۴ متر |
| درجه آزادی و موتور | سه درجه آزادی – چهار موتور |
| ابزارهای روی بازو | یک مجری در انتهای بازو- دوربین های تصویربردار |
| مکان بازو | مستقر بر روی عرشه ربات |





دیدگاهتان را بنویسید