

Drone ها یا همان هواپیماهای بدون سرنشین (رباتهای پرنده) در صورتی که تنها از یک دوربین برای دید هنگام عبور از موانع استفاده کنند به شدت در معرض برخورد با موانع هستند، رباتهای پرنده آزمایشگاه UMH مریلند با کمک یک ماژول پردازشگر گرافیکی (کارت گرافیک) مدل Nvidia TX2 بر روی خود و یک سنسور اپتیکال نوری در زیر خود که ترکیبی از سونار و دوربین را شامل میشود قادر به عبور از موانع خاص هستند.

انواع خاصی از حشرات نظیر زنبورها وجود دارند که می توانند از موانع بسیار پیچیده با سرعت بالا عبور کنند، بدون اینکه برخوردی با دیواره ها داشته باشند.
در آینده قابلیت خودمختاری در رباتها بسیار مهم خواهد بود، از این رو پژوهشگران گروه رباتیک و گروه ادراک مریلند در حال کار بر روی سیستمی هستند که به رباتهای پرنده اجازه می دهد تا از درون شکافهای کوچک و کاملاّ ناشناخته، تنها با کمک پردازنده دوربینی که با ماژول Nvidia TX2 کنترل میشوند عبور میکنند.
“این ویژگی الهام گرفته از زنبور عسل است که درصد موفقیت ان در عبور از موانع ۸۵ درصد می باشد.”
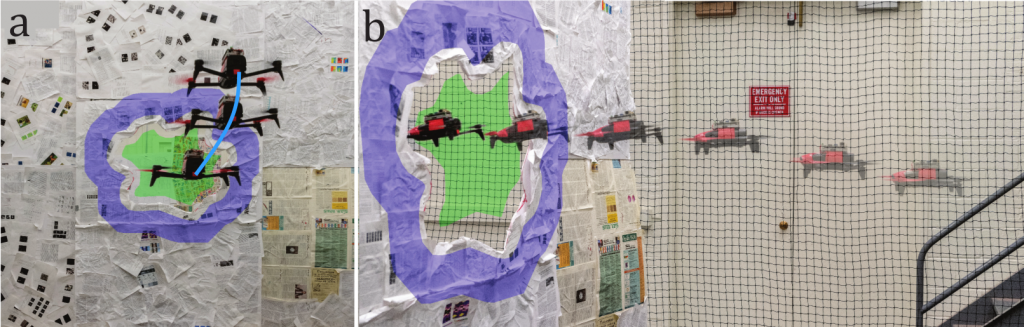
قبلا نیز رباتهای پرنده قادر به عبور از موانع خاص بودند اما نکته ای که در اینجا کاملا به چشم می خورد، نیاز نداشتن ربات به تصاویر از پیش گرفته شده از موانع می باشد به طوری که ربات به صورت زنده قادر به شناسایی و تحلیل موانع می باشد و خود را برای عبور از انها اماده میکند.
این سیستم با کمک سنسورهای سونار و از مقایسه زمان ارسال و دریافت امواج صوتی بعد از برخورد با موانع راه خود را پیدا میکند و به صورت انلاین در جهت بهبود وضعیت مکانی خود شروع به جابهجایی میکند.
محققان UMH این آزمایش را با یک ربات پرنده مدل Bebop 2 که با ماژول GPU Nvidia Jetson TX2 ست شده است، انجام دادهاند. همچنین موانع مختلفی را بر روی دیوار و با اندازههای متفاوت برای هر نوبت ازمایش ایجاد کردند، از بین ۱۵۰ نمونه مانعی که برای ربات در نظر گرفته شد، ربات قادر به عبور موفق از ۸۵ درصد از موانع شد، همچنین حداکثر سرعت ربات برای عبور از موانع ۲.۵ متر بر ثانیه ثبت شده است. محققان UMH در ادامه توضیح دادهاند که این سیستم هنوز ضعیف است و با ایجاد تغییراتی میتواند عملکرد بهتری نسبت به قبل داشته باشد.





دیدگاهتان را بنویسید