

در این مقاله درباره چگونگی استفاده ناسا از رباتهای برای تهیه سوخت با کمک خاک مریخ بحث خواهیم کرد.

ناسا در حال طراحی و توسعه رباتهایی است که با کار در کنار یکدیگر در مریخ قادر خواهند بود موادی چون آب، اکسیژن و سوخت را از خاک این سیاره سرخ استخراج کنند تا در ماموریتهای فضایی بعدی نیاز به حمل این مواد از زمین نباشد.
اما چرا باید مواد را به جای انتقال از زمین در مریخ تهیه کنیم؟ در اینجا ناسا مسئله نسبت دهنده (gear-ratio problem) را ارائه میکند. براساس برخی برآیندها برای حمل یک کیلو گرم سوخت از زمین به مریخ با موشکهای امروزی، باید ۲۲۵ کیلوگرم سوخت را مصرف کنیم، یعنی ما سفر خود را با ۲۲۶ کیلوگرم سوخت آغاز می کنیم و در نهایت با یک کیلوگرم سوخت اضافه به مریخ خواهیم رسید، که باعث یک نسبت چرخشی ۱ به ۲۲۶ می شود. حال بیاید واقع بینانه تر به این موضوع نگاه کنیم؛ برای حمل یک تن آب یا اکسیژن باید ۲۲۵ تن سوخت مصرف کنیم!!! بنابراین بهترین راه حل درحالحاضر استفاده از مواد معدنی خود مریخ می باشد.
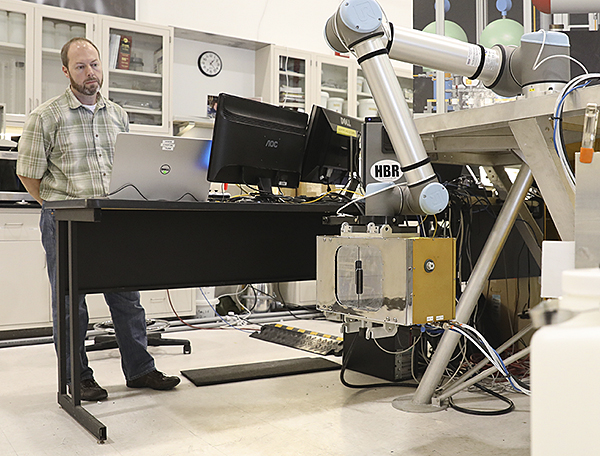
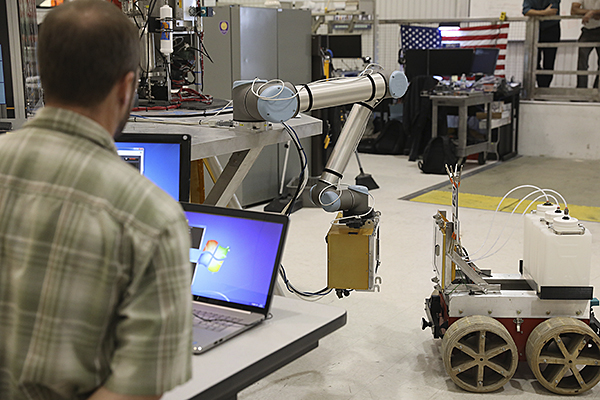
گروههای مختلفی در حال تحقیق و کار بر روی این پروژه هستند، اخیراً گروه Swamp Works، یکپارچه سازی بسیاری از ماژولهای مختلف این پروژه بزرگ رباتیک را شروع کرده است، این فعالیتها برای تهیه یک نمونه اولیه می باشد تا نیازهای لازم برای ساخت این کارخانه رباتیک دیده شوند، برای یک گام متوسط قرار است این پروژه در ماه پیاده سازی شود تا مورد بررسی و آزمایش قرار بگیرد.
لازم به ذکر است که خاک یا گرد و غبار روی هر جسم فضایی به عنوان رگولیت شناخته میشود. این مواد اغلب مواد آتشفشانی یا شهاب سنگهایی هستند که در طول گذر زمان و تغییرات آب و هوایی، خُرد و به پودر تبدیل شده اند. در مریخ لایهای از مواد معدنی آهنی زنگ زده وجود دارد، (رنگ سرخ مریخ نیز مدیون این مواد می باشد) که در زیر این لایه یک لایه زخیم از سیلیکات با نامهایی مثل: فلوسپات، پیروسکن و آلیوین قرار دارد که از ساختارهای سیلیکونی و اکسیژن متصل به فلزات مثل آهن، آلومینیوم و منیزیم تشکیل شده است.
کاوش و استخراج این مواد بسیار سخت و چالش برانگیز است، ما در زمین به کمک ماشین آلات سنگینی که داریم و البته به لطفا جاذبه بیشتر زمین نسبت به مریخ به راحتی می توانیم از معادن بهره برداری کنیم. اما در مریخ به دلیل جاذبه کم، نیاز داریم تا نیروی بیشتری برای معدنکاوی در مریخ صرف کنیم، علاوه بر این نباید مسئله نسبت چرخشی ۱ به ۲۲۶ را نیز فراموش کنیم زیرا حمل ابزارهای بسیار سنگین معدنکاوی از زمین به مریخ مستلزم مصرف سوخت بسیار بالایی است، بنابراین باید در مریخ از تجهیزات سبک وزن استفاده کنیم.

ناسا در حال ساخت یک بیل مکانیکی رباتیک با دو درام است که می توانند در جهات مختلف بچرخند و حفاری کنند تا کمترین نیرو را در گرانروی کم سیاره مریخ مصرف کنند
RASSOR که مخفف Regolith Advanced Surface Systems Operations Robot است، یک وسیله نقلیه رباتیک معدنکاری طراحی شده برای اهداف خاص میباشد؛ برای حفاری و کاوش رگولیت در سطح کم جاذبه، مهندسان ناسا با طراحی RASSOR توجه ویژهای به سیستم کار این ربات دارند. محرکهای ربات شامل موتورها، گیربکسها و مکانیزمهای دیگر درصد زیادی از جرم نهایی سیستم را به خود اختصاص داده اند، بر همین اساس، در طراحی سعی شده که از سیستم ترمز الکترومغناطیسی و قالبهای چاپ شده تیتانیومی با پرینتر سه بعدی استفاده شود.
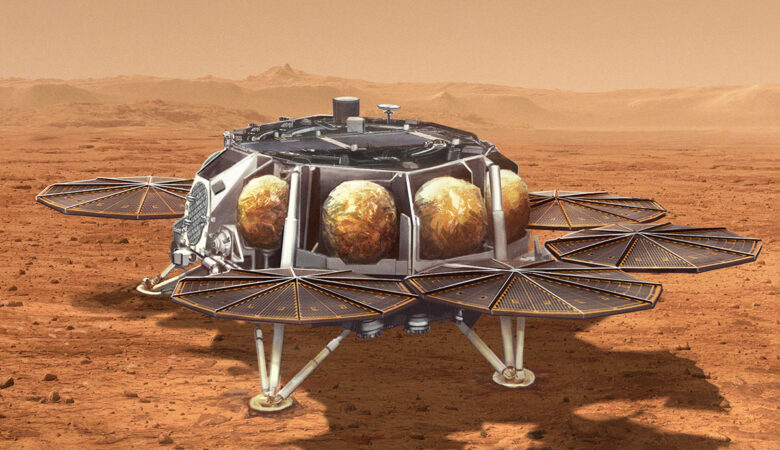
همان طور که در شکل ها مشاهده می کنید این ربات حفاری دارای دو سطل یا مخرن درام می باشد که هر کدام در دو جهت مختلف برای برداشتن مواد از سطح مریخ میچرخند (مرحله ۱). بعد از برداشت مواد از سطح مریخ ربات درامها را بالا برده و به سمت مرکز پردازش تعریف شده حرکت میکند تا محموله خود را برای تجزیه سازی داخل آن بریزد (مرحله ۲)، در این مرکز تمامی مواد تجزیه میشوند که بخشی به صورت آب و بخشی نیز به عنوان مواد مورد استفاده در چاپگرهای سه بعدی سطح مریخ زخیره سازی میشوند (مرحله ۳). آب به دست آمده علاوه بر مصارف آشامیدنی برای تهیه سوخت با کمک فرآیند الکترولیز نیز مورد استفاده قرار می گیرد، بدین صورت که با تجزیه مولکولهای H2O آب می توان ترکیبهای دیگری مثل O2 و H2 بدست آورد. اما گاز هیدروژن بدست امده باید در دمای بسیار پایین نگه داری شود که ناسا برای حل این مشکل اقدام به ترکیب هیدروژن با کربن جو مریخ (۹۶ درصد مریخ دارای گاز کربن دی اکسید می باشد) خواهد کرد تا متان بدست بیاید، زیرا این ترکیب به راحتی قابل ذخیره سازی و نگه داری است. ادامه روند توسط بازوی رباتیک hopper-life انجام میشود(مرحله ۴)، که بعد از تجزیه و مهر و موم کردن مواد نهایی در بستههایی مشخص ادامه کار توسط ربات دیگری انجام می شود تا محموله ها را برای زخیره سازی به سمت مخازن ببرد (مرحله ۵).






دیدگاهتان را بنویسید