

تاسوارهها یا ماهوارههای مکعبی نیز مانند تمامی فضاپیماها دارای فناوری مخصوص خود میباشند که از ترکیب زیرسیستمهای مختلفی تشکل شده است، پیکره تاسواره خود از چندین زیرسیستم تشکیلشده است که بهطورکلی برای همه ماهوارهها چند زیرسیستم جامع تعریف میشود، در این مطلب در مجله اینترنتی SpaceRobot عامترین زیرسیستمهای یک ماهواره را معرفی میکنیم؛
زیرسیستمهای متداول ماهواره
- انرژی الکتریکی (Power subsystem)
- کامپیوتر روی برد
- کنترل حرارت (TCS- Thermal control Subsystem)
- مخابرات
- کنترل وضعیت (ADCS- Attitude Determination & control Subsystem)
- سازه (Structure Subsystem) و مکانیزمها
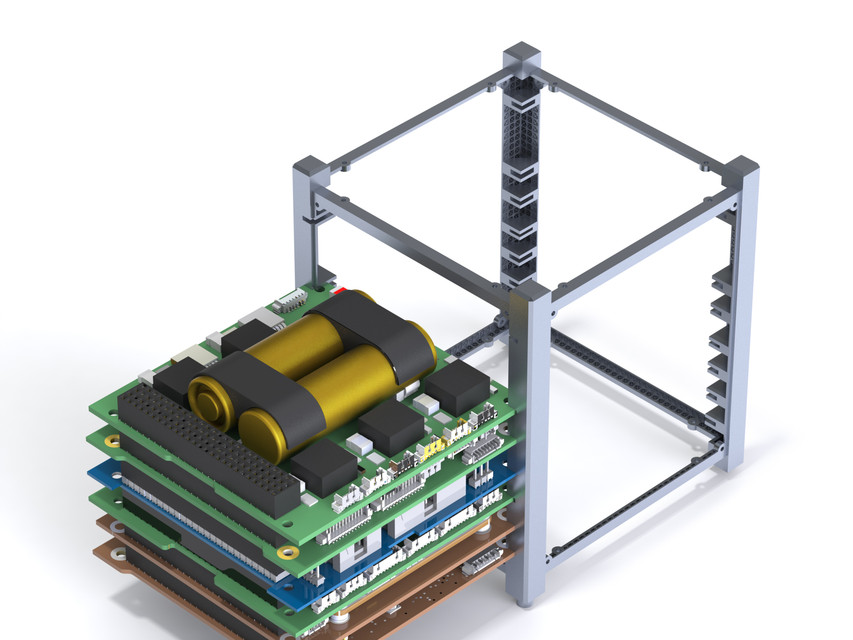
زیرسیستم انرژی الکتریکی، وظیفه تأمین توان الکتریکی کلیه اجزاء الکتریکی ماهواره (تاسواره) را بر عهده دارد، این سیستم با کمک باتریها و صفحات خورشیدی نسبت به تأمین و ارائه توان مناسب به هریک از اجزاء الکترونیکی اقدام میکند.
زیرسیستم کامپیوتر روی برد، وظیفه اجرای و مدیریت داده و فرمان تحت عنوان تلهمتری و تلهکامند (Telemetry & Telecommand)، و دیگر فعالیتهای پردازشگری را به عهده دارد و بهنوعی قلب تپنده ماهواره (تاسواره) است.
زیرسیستم سازه و مکانیزمها، مسئولیت جایابی زیرسیستمهای ماهواره، تحمل بارهای استاتیکی و دینامیکی، طراحی و ساخت جعبههای نهایی مربوط به زیرسیستمها و همچنین سازه اصلی ماهواره (تاسواره)، مونتاژ نهایی زیرسیستمها در داخل سازه و انجام تستهای مختلف بر روی سازه را عهدهدار میباشد.
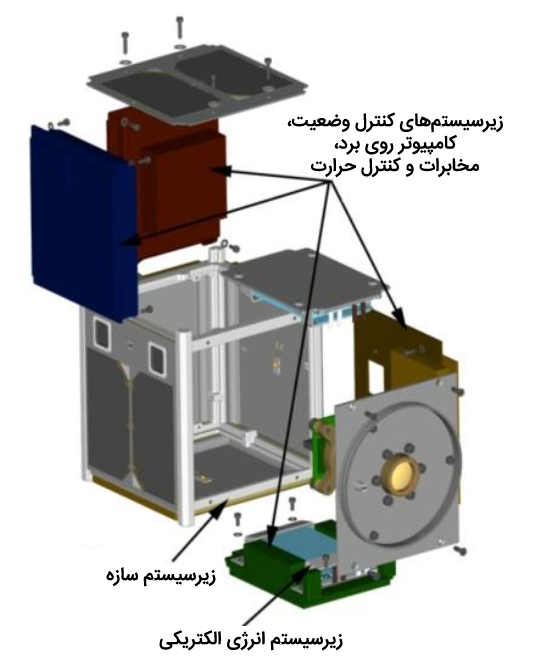
زیرسیستم کنترل حرارت TCS، همانطور که از نامش پیداست باید شرایط حرارتی موردنیاز در راستای تأمین درجه حرارت مجاز برای کارکرد درست دیگر اجزا را فراهم آورد.
زیرسیستم مخابرات، درواقع پوششدهنده مسئولیتهایی همچون اجرای ارسال و دریافت دادههای ماهواره، ذخیره و ارسال داده، فرستنده، گیرنده، آنتن و همچنین عملیات مربوط به ایستگاه زمینی است. البته پارهای از عملیات مربوط به این زیرسیستم در قالب محموله مخابراتی نیز قابلاجرا است.
زیرسیستم کنترل وضعیت ADCS، وظیفه برآورد جهت ماهواره در آینده با استفاده از مودهای دینامیکی و اطلاعات موجود وضعیت در گذشته، اما کنترل وضعیت عبارت است از جهتدهی ماهواره به یک راستای مشخص و از پیش تعیینشده که خود شامل دو بخش است: ۱- پایدارسازی وضعیت یا نگهداشت وضعیت موجود، ۲- کنترل مانور وضعیت.





دیدگاهتان را بنویسید