
تعادل ربات HERMES موسسه MIT با کمک تعادل انسان
پژوهشگران موسسه MIT سیستم رباتیک جدید ابداع کردهاند که قابلیت انتقال حرکت از انسان به ربات و از ربات به انسان را دارد.
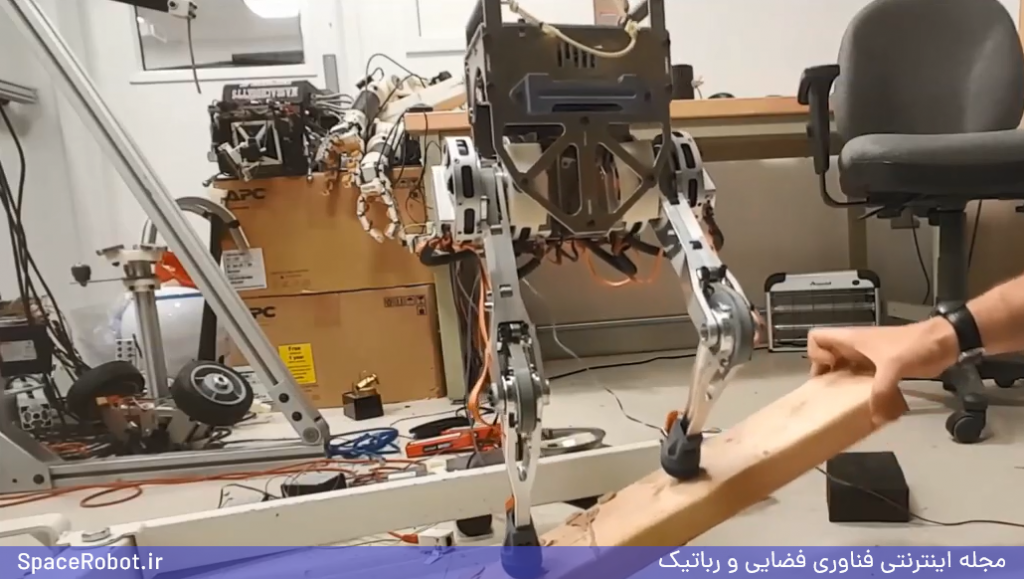
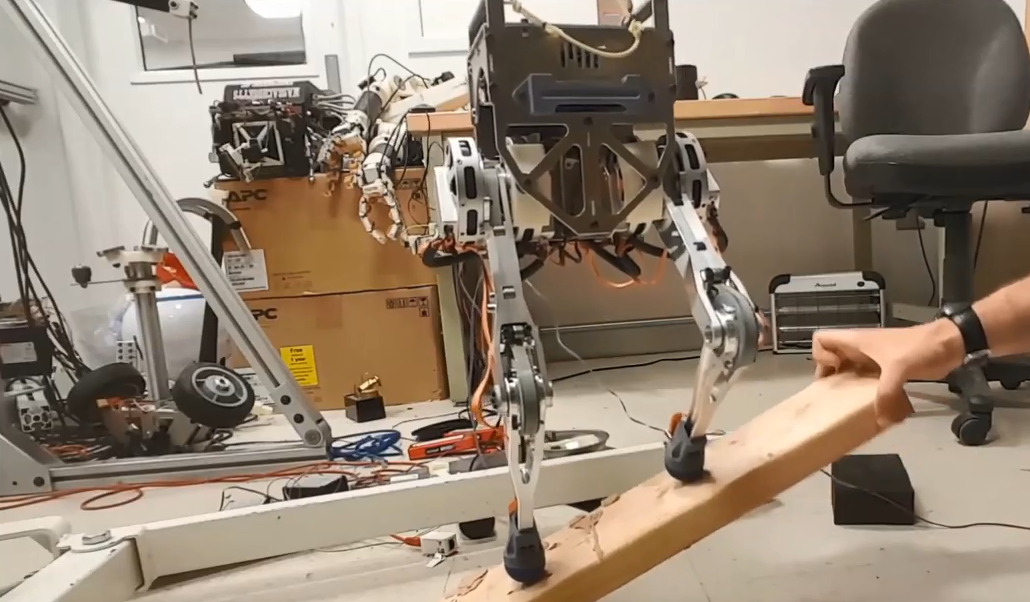
محققان موسسه MIT نوعی سیستم کنترل از راه دور ویژه برای ارتباط بین یک ربات دوپا و انسان طراحی کردهاند. این ربات دوپا که نام HERMES را برای آن انتخاب کردهاند از نوعی سیستم کنترل از راه دور برای برقراری تعادل خود با کمک بازخوردهای یک انسان استفاده خواهد، بدینصورت که اپراتور ابتدا باید مجهز به مکانیزمی الکترومکانیکی شود ( درواقع اپراتور باید یک لباس مکانیکی را بپوشد) تا ربات به کمک عملگرها و حرکات سیستم الکترومکانیکی و بهتبع آن واکنش اپراتور به حرکات، اقدام به حفظ تعادل خود کند، این سیستم علاوه بر اینکه حرکات انسان را به ربات منتقل میکند، حرکات ربات را نیز میتواند به اپراتور منتقل کند تا درنتیجه این تبادل اپراتور با حرکات مختارانه، تعادل خود و درنتیجه آن تعادل ربات را حفظ کند.
این ربات در حال حاضر یک نمونه آزمایشگاهی است که فقط از یک بدنه ساده با دوپا تشکیلشده است، تقریباً یکسوم انسان بالغ اندازه دارد و توانایی قدم زدن و پریدن را نیز دارد. این مکانیزم رباتیک بهخودیخود چندان چشمگیر نیست و به گفته دستاندرکاران پروژه میتواند پیشزمینهای برای پیشرفتهای آینده درزمینهٔ ارتباط موبایلی رباتها و همچنین حفظ تعادل آنها باشد.
مقاله معرفی سیستم جدید کنترل
مقاله اصلی این پروژه در شماره جدید مجله Science Robotics ارائه شده است، João Ramos و Sangbae Kim مدیر آزمایشگاه Robotics Biomimetic MIT در مقاله مورداشاره استدلال کردهاند که رویکرد آنها در طراحی این سیستم بر اساس دو موضوع مهم میباشد؛ اول اینکه سیستمهای کنترل از راه دور فعلی قابلیت انطباق کامل عملکرد اپراتور به ربات را ندارند و دوما سیستمهایی که حرکات ربات را بررسی میکنند هیچ بازخوردی از حرکات را به انسان مخابره نمیکنند.
درنهایت ضعفهای ذکر شده، در سیستم جدید ربات HERMES رفع شدهاند.
در ویدئوی زیر بهطور کامل قابلیتهای این ربات را مشاهده خواهید کرد، برای درک بهتر قابلیتهای ربات HERMES این ویدئو را تا پایان تماشا فرمایید.
اگر فیلم را دقیق مشاهده کنید ملاحظه خواهید کرد که هر دو شرط ارائهشده در مقاله بر روی ربات تست میشود اول اینکه ربات حرکات انسان را بهطور دقیق و به نسبت خود تقلید میکند و دومین موضوع مهم یعنی مخابره حرکات ربات به انسان نیز تست میشود ( زمانی که به ربات ضرباتی وارد میشود تا آن را از تعادل خارج کند سیستم کنترلی حرکت ربات را به اپراتور منتقل میکند و سپس اپراتور با حفظ تعادل خود، تعادل ربات را نیز حفظ میکند).
چنین هماهنگی پویا نتیجه مقیاس بندی اجزای اصلی دادههای حرکتی انسان به نسبت روبات در زمان واقعی و اعمال نیروهای بازخورد به اپراتور متناسب با سرعت نسبی بین انسان و ربات، میباشد.
در ویدئوی بالا نیز نحوه کارکرد سیستم کنترلی پیاده شده بر روی ربات شرح داده شده است.





دیدگاهتان را بنویسید